自動車TMの展望(CVT、AT、DCT、SMT)
自動車業界では、トランスミッション(TM)はここ10年で劇的に変化しています。
面白いことに自動車のAT(オートマチックトランスミッション)は
過去30年を振り返ると前半の20年はATが機械式から電子制御式に
なったかどうかくらいの大きな変化しかありませんでした。
ここ10年はどうでしょうか?
CVTも昔からあったにしても急速に普及しました。
ATは3AT,4ATがほとんどで5AT化が大きな障壁でしたが、今では9ATまで実用化されています。
DCTはここ10年の産物。とくにVWのゴルフR32で登場したときは衝撃でした。
SMTはいすずNAVI-5が30年前に登場、ここ10年で盛り上がったが今はヨーロッパのみ。
理由は特許、生産設備、市場要求、コストなどいろいろありますが、
モデルベース開発の観点から紹介します。
MBDの取り組み
実はモデルベース開発が騒がれてから約10年ですが
トランスミッション業界ともリンクしています。
一つは開発効率が上がったこともありますが、
モデルベース開発を使うと使わないとでは大きく異なる部分があります。
それは
”トランスミッションの内部状態を知ることができる”
かどうかです。
これがものすごく大きいと思います。
MBD使わず実験だけで繰り返して開発を昔はしていたかも知れませんが、
トランスミッション制御するのに油圧を使います。
モデルベース開発の場合は大ざっぱですがトランスミッションの
内部状態として油圧を知ることができます。
次にエンジン&トランスミッションだけでなく車両としての挙動が把握できます。
もちろん、MBDに落とし込むのに過去の経験や実験データが必要不可欠ですが、
そのおかげでMBDで期間短縮できるようになっただけでなく、
実験でも知ることが難しいデータを知ることができるのが大きいと思っています。
ダイナミックベース制御
この言葉はあまり文献で見られないかも知れませんが、
日本語で
”運動に基づく制御”
ということです。
わかりやすく1次遅れ系を例にします。
ステップ応答の場合は1次遅れの形になります。
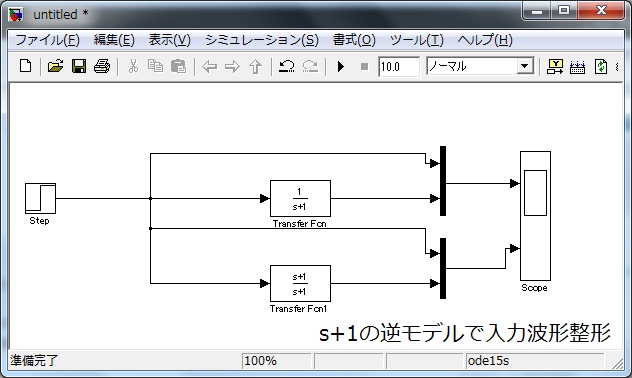
即応性を上げるにはどうしたらよいか?
ということを考えると、1次遅れ系のダイナミクスに基づいて
逆モデルを使って入力波形整形する。
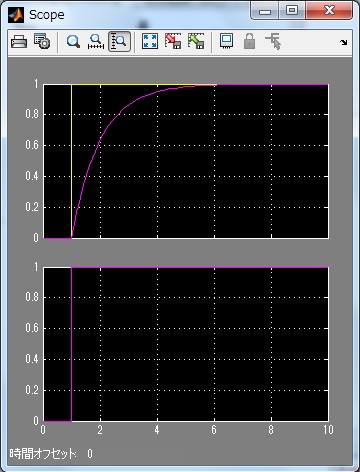
こうすればよいことはなんとなく推察できます。(実際できるかは別として)
簡単な系なら直観的にも作り上げることは可能ですがトランスミッションで
多段がされてくると、もうコントローラの設計は実験的にも非常に難しくなります。
ですが、MBDを使うのであれば運動方程式がすでに求められているので
それをベースに逆モデルを使って入力波形整形、
あるいは”モデルマッチング”をして設計できます。
それだけでなく、自動車の挙動や油圧内部状態まで推察できてしまいます。
これってモデルベース開発以外にはありえませんよね?
こういう発想ができると、実際にトランスミッションを試作する前に
企画の段階で方向性を決めることができるメリットがあります。
自動車TMの展望として
ホンダのハイブリッド専用DCT
MBDのおかげで複雑なものも作りやすくなったと思います。
例えばホンダのFITではハイブリッド専用のDCTを作っています。
トランスミッション自体も一般的な3軸式のDCTにハイブリッド用のモータ
部分に遊星歯車を利用する。
常時噛合いと遊星歯車のハイブリッド方式という面白い構造になっています。
あとは特許の問題をクリアすればこうしたトランスミッションがどんどん出てきそうです。
振動消去
今実用化されているかわかりませんが、制御にはアクティブノイズコントロールの様な
”繰り返し制御” ”適応制御”
と呼ばれるものがあります。
自動車の静音性評価するときにアイドリング騒音や振動を考える場合があります。
トランスミッション、エンジン、モータを繰り返し制御使って統合制御すれば
とりあえずアイドリング時の振動をモータで逆位相の振動を作り出すことができれば
制振制御ができそうです。
ハイブリッド用のSMT
ホンダのCR-ZのMT車がどういうスペックかわかりませんが、シングルクラッチの
MT車って変速するときにエンジンとTMが完全に切り離されてしまい
”トルク抜け”が発生します。
トルク抜けは変速するときなる”ガッコン”ってやつです。
それを低減するのに、変速時に完全にクラッチオープンしたときだけ
モータで助けるってこともできるかも知れません。
もっともMT車を選んでいる時点でトルク抜けを気にする人は
あまりいないと思いますが・・・
ATは駆動力制御から運転点制御の時代へ
ATの変速継ぎ目はほとんど気にならないレベルになっています。
今までは最適駆動力を得られるようなシフトマップ/制御。
これからは燃費を考慮し最適運転点を狙いながらフィーリングを保つ制御に
変わってくるんではないかと思っています。
そもそも、実現できるかどうかわかりませんが・・・
より高度な統合制御や油圧ポンプレス
マイクロハイブリッド
BMW MINIに代表される「マイクロハイブリッド」と呼ばれる技術です。
直接TM制御するものではありませんが、通常のハイブリッドはエンジンとモータで
駆動力を発生させるものです。
これに対してマイクロハイブリッドは減速時の回生エネルギを12Vバッテリの
充電用オルタネータの代わりに使うものです。
これによりオルタネータの損失が減り燃費が向上する技術です。
私の記憶ではBMW MINIが最初だった気がしますが今ではSUZUKIのエネチャージ
など様々な呼び方で地味にガソリン車に搭載されつつあります。
電動ターボや油圧ポンプ
電動ターボ
今はガソリン車はダウンサイジングでターボ車が多くなっています。
排気ガスを使うためにエンジンが低回転時は大きな出力が得られません。
それをモータを使いターボを回すものです。
ターボ車特有の低速域での駆動力不足が解決できれば
よりダウンサイジングが進むかもしれません。
電動油圧ポンプ
トランスミッションのクラッチ要素を制御するには油圧を使っています。
その油圧はどこで作るか?
それはエンジンの回転力から取得しています。
この油圧ポンプが実はかなりエンジン駆動力を消費します。
特にCVT車はギヤレンジが広く取れることが魅力ですが、
プーリを動かすために高い油圧と流量を必要とし、
車両システム全体としては今のところ多段ATよりも燃費が良いのですが、
エンジンの出力をかなり消費してしまいます。
ですからATの多段化がより進むとCVT車はどう頑張っても
機械効率が悪いためにATに対して燃費で負けてしまいます。
それをもし、油圧ポンプを電動式にして、それが効率が良いのであれば
搭載する車両が出てくるかもしれません。
ちなみに、今パワステの電動化が進んでいますが油圧式をやめて電動化が
進んでいる理由の一つとして油圧ポンプ駆動で消費されるエネルギの低減があります。
結局のところ
ハードウェア的に実現可能であれば
より高品質で複雑なものができるかと思います。
別の見方をすれば、ハードウェアを実際に作ってから
できるかどうかというやり方でなく、トランスミッションは
ハードウェアとソフトウェアがセットになってAT、CVT、DCTが成立しています。
ですから、ハードウェアを作る前に仮想的に数式でTMモデルを作って
シミュレーションで見通しを立てることが可能です。
そうすれば、MBD開発がソフトウェア開発だけでなくハードウェア開発
にも役立てる魅力的な分野です。

この記事へのコメントはありません。